« MHP/RT »
Model Human Processor with Real Time Constraints
Summary
We propose "Model Human Processor with Real Time Constraints" as a simulation model of human behavior selection. It stems on the successful simulation model of human information processing, Model Human Processor (Card, Moran, and Newell, 1983), and extends it by incorporating three theories, Maximum Satisfaction Architecture (MSA, presented at CogSci2007), Structured Meme Theory (SMT, presented at CogSci2008), and Brain Information Hydrodynamics (BIH, presented at CogSci2008). MSA, SMT and BIH deal with coordination of behavioral goals, utilization of long-term memory that works as an autonomous system, and a mechanism for synchronizing individual with environment, respectively. MHP/RT works as follows: 1) inputs information from environment and individual, 2) MHP/RT builds a cognitive frame in working memory, 3) resonates it with autonomous long-term memory, 4) maps the resonance on consciousness to form reduced representation of the input information, 5) predicts future cognitive frames to coordinate input and working memory.
Overview of MHP/RT
As shown in Figure 1, human beings operate in two bands: asynchronous band and synchronous band. In the asynchronous band, bodily coordination monitoring system and memory processing system operate. In the synchronous band, perceptual information processing system, conscious information processing system, autonomous automatic behavior control processing system, and behavioral action processing system operate. These systems are autonomously working. MHP/RT shown in Figure 2 refers to the mechanism for synchronizing the autonomous systems shown as round rectangles in Fig. 1 working in the "Synchronous Band."
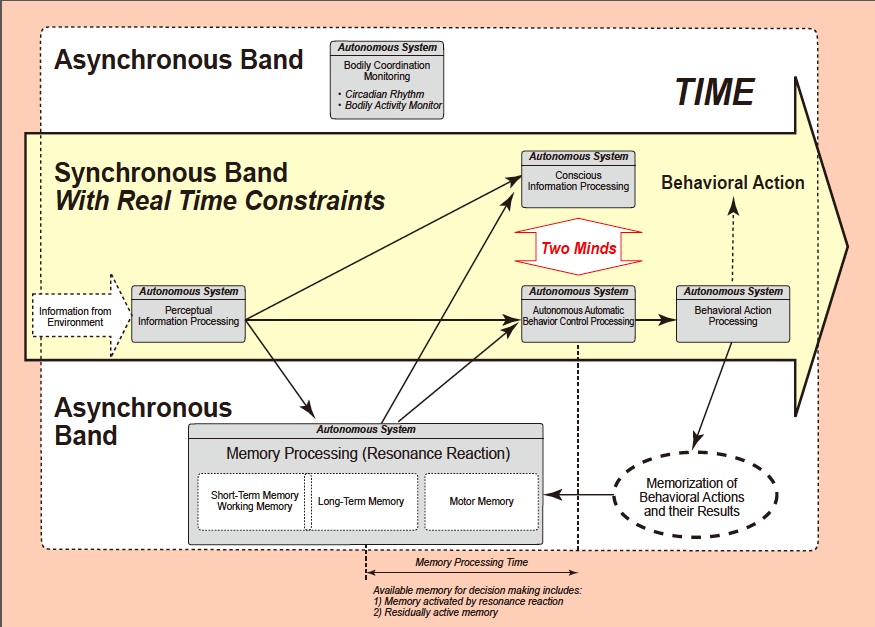
Figure 1. Human beings operate in two bands; asynchronous band and synchronous band.
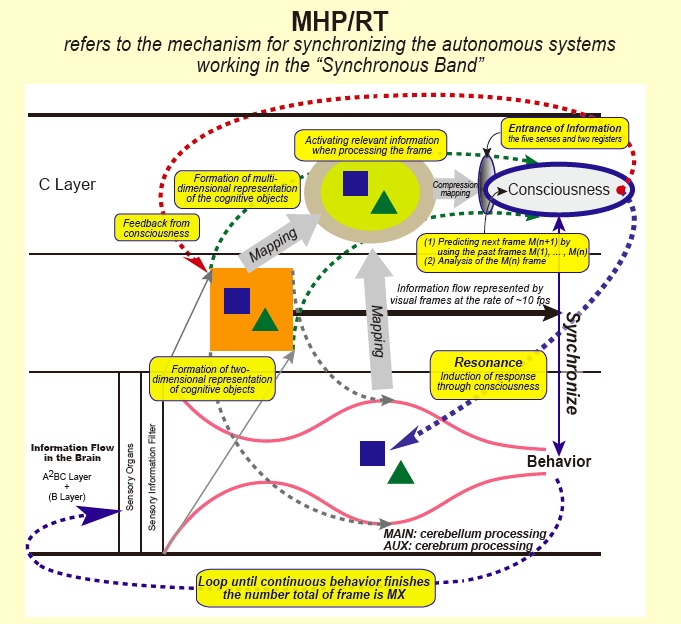
Figure 2. Schematic representation of Model Human Processor with Real Time Constraints, MHP/RT.
Origin of MHP/RT
MHP/RT shown by Fig. 2 was created by combining two seminal works in different fields that deal with human behavior. The first work is Model Human Processor, or MHP in short, in the filed of applied psychology (Figure 3). MHP successfully simulates human users who are operating information devices in order to accomplish computerized tasks. The other work is so called Two Minds that operate in human economical decisions (Figure 4). This is the basis of the field of behavior economics founded by D. Kahneman, a famous Nobel prize winner. These two works are combined by applying our conceptual framework of Organic Self-Consistent Field Theory (Figure 5, or Fig.B on Home).
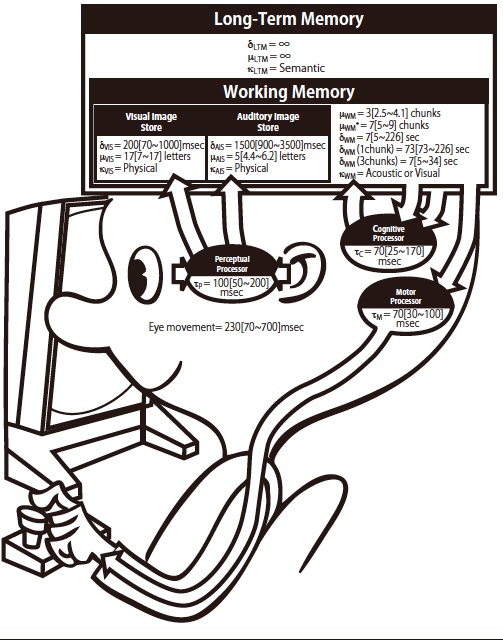
Figure 3. MHP (Model Human Processor) by Card, Moran and Newell in Applied Cognitive Psychology.
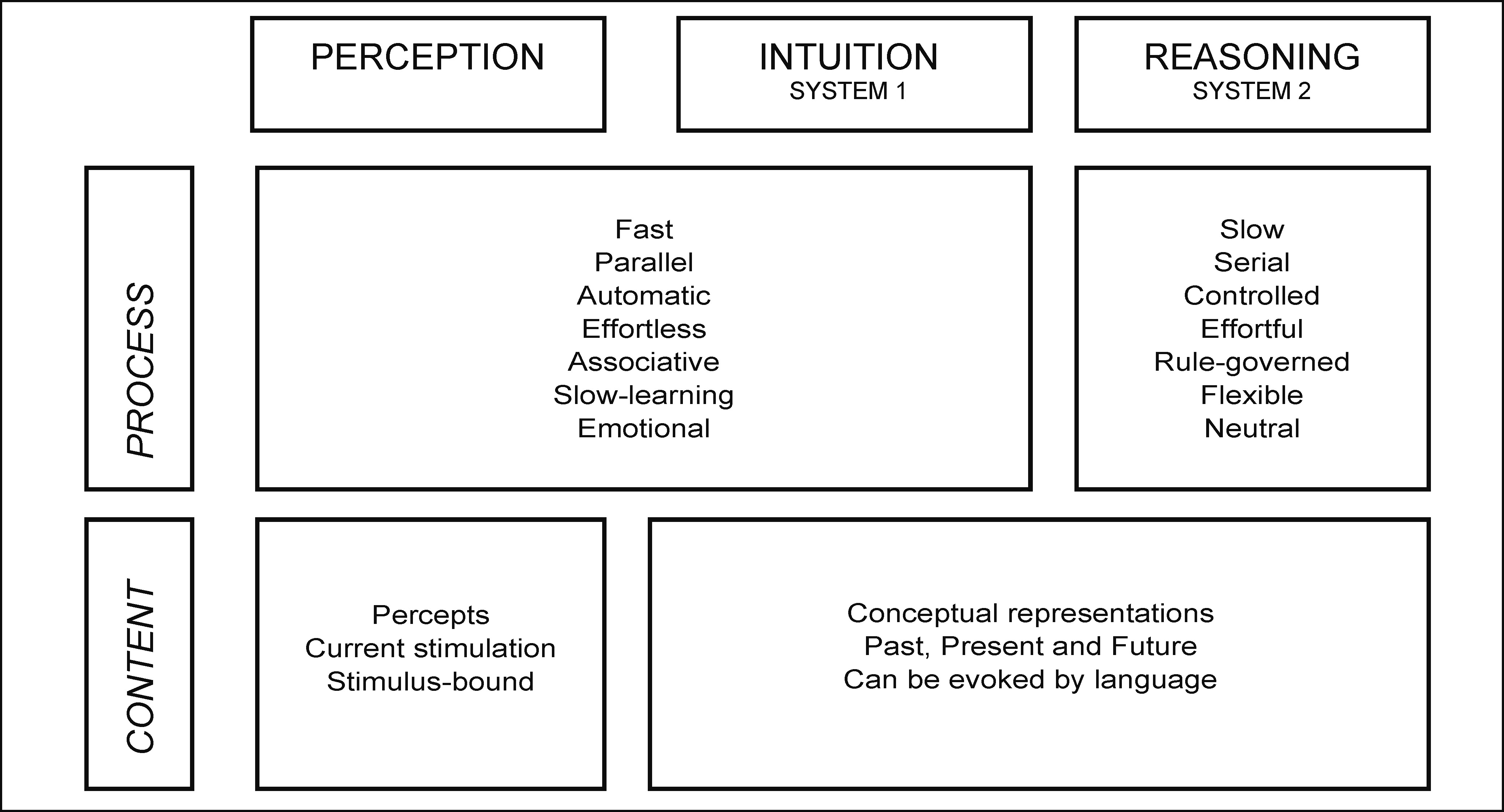
Figure 4. Process and Content in Two Cognitive Systems, adapted from Kahneman (2003) "A Perspective on Judgment and Choice Mapping Bounded Rationality", American Psychologist.
The attributes of the two processing systems are contrasted below:
| Experiential Processing System (Intuition: SYSTEM 1) | Rational Processing System (Reasoning: SYSTEM 2) |
|---|---|
| Pleasure-pain oriented: What feels best now | Rationally oriented: What yields the greatest net benefits |
| Connections determined by the principals of classical conditioning | Connections determined by the principals of logic |
| Has a long evolutionary history and operates in animals as well as humans | Has a brief evolutionary history, operates through language |
| Holistic | Analytic |
| Encodes reality in concrete images, metaphors and narratives | Encodes reality in abstract symbols, words and numbers |
| Rapid processing: Oriented toward immediate action | Slower processing: Oriented toward future action |
| Slow to change: Change requires repetitive or intense experience | Rapid to change: Changes with the speed of thought |
| Experienced passively, outside of conscious awareness [one is seized by one's emotions] | Experienced actively and consciously [one intentionally follows the rules of inductive and deductive reasoning] |
| Certainty is self-evident [seeing is believing] | Certainty requires justification via logic and evidence |
| Perception, motivation, and behavior are state dependent | The principles of logic are independent of local state |
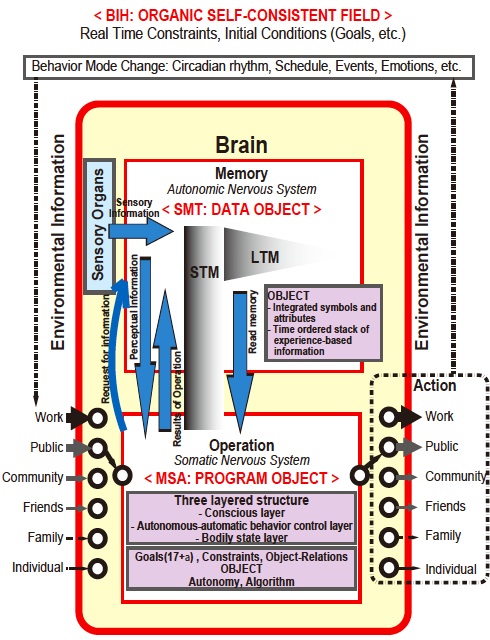
Figure 5. NDHB-Model/RT (Nonlinear Dynamic Human Behavior Model with Real Time Constraints) proposed by Toyota and Kitajima at CogSci2009.
Memory process: Store and Use by Resonance
Memory processes, store and use, have not been considered in detail by MHP nor Two Minds. However, in order to carry out real time simulation of human decision makings in daily life, memory processes play very important role. As A. Newell described in his seminal book, "Unified Theories of Cognition", human beings operate differently according to the characteristic times that the environment they are in (Figure 6).
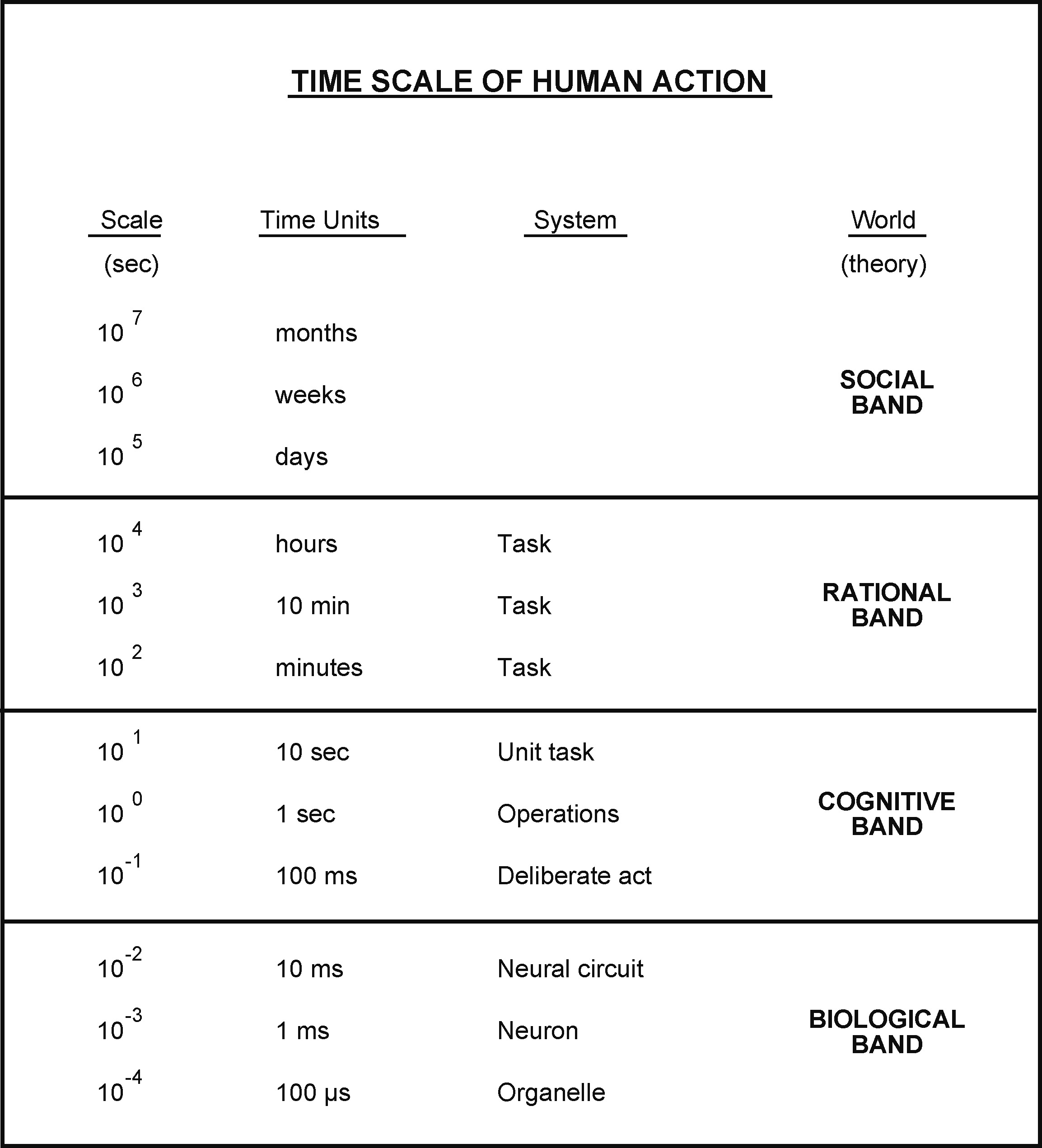
Figure 6. Newell's time scale of human action.
In parallel with Newell's, we depict in Figure 7 how the memory system should react to the environment depending on the degree of time constraints that the human–environment system, or organic self-consistent field, should pose on itself. When real time constraints are strong, slow memory processes that use long-term memory should not participate in the whole processing. In other words, only the unconscious side of the Two Minds system should work. On the contrary, when there are little real time constraints, both systems, consciousness and unconsciousness systems work collaboratively in some cases and independently in other cases.
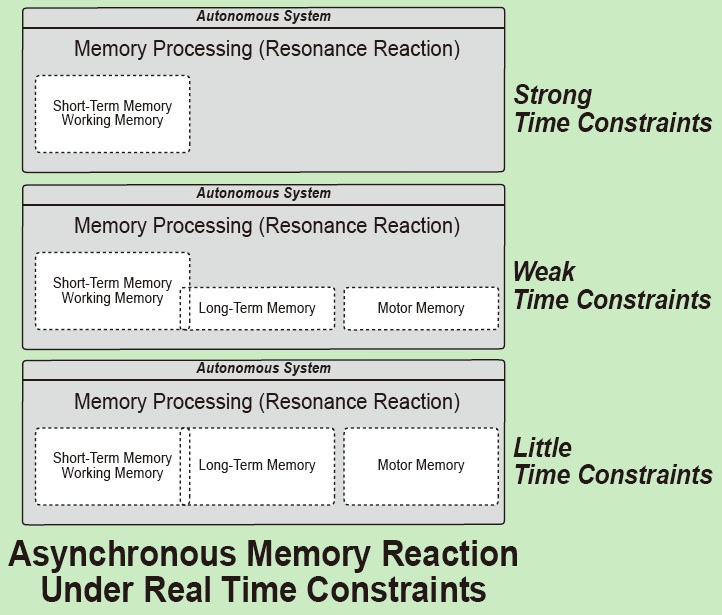
Figure 7. Memory reaction under real time constraints.
We assume that memory is organized by "Multidimensional Frame." MD-frame is a conceptual extension of Minsky's frame. It is a primitive cognitive unit that conveys information that can be manipulated by brain under various constraints, similar to the concept in the ICM theory by G. Lakoff, the schema theory by D. Rumelhart, and so on. There are two kinds of MD-frame in our theory. BMD-frame (Behavior Multidimensional frame) is created and used by Autonomous Automatic Behavior Control Processing. RMD-frame (Relational Multidimensional frame) is created and used by Conscious Processing. BMD-frame and RMD-frame are mutually connected by sharing OBJECT, originated from Perceptual Processing.
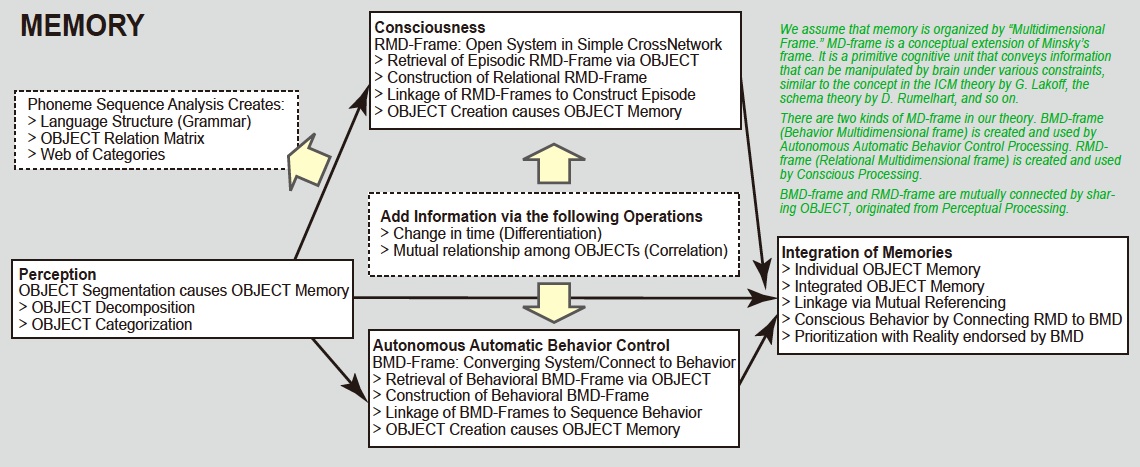
Figure 8. Structure of memory.
Interaction between unconscious process and conscious process
The essential part of the model is to show how Two Minds operate in shaping behavior under real time constraints. Figure 9 describe schematically the interaction between two systems. It goes as follows:
- Request for behavior to A2BC Layer: Initially autonomous automatic behavior control layer responds to the information from the environment.
- Behavior: Then unconscious behavior should result.
- Request for behavioral support to C-Layer: At the same time, request for support is sent to conscious layer.
- Request for Information to Perception: Consciousness controls perception by requesting specific information C-layer wants to acquire.
- Information from Perception followed by its registration if good experience should result: Then the specific information is fed into the system.
- Behavioral support by C-Layer: The information that C-layer's activity has tuned should help behavior carried out in A2BC layer.
- Created after Experience: The resultant state of behavior will be evaluated by C-Layer.
- Initiation of Preparative Consciousness Activity if Perceptual Information were Registered: In the C-layer, a parallel process should occur in which the result of control is evaluated. If the result is good, the perceived information should pre-fetch the future conscious state.
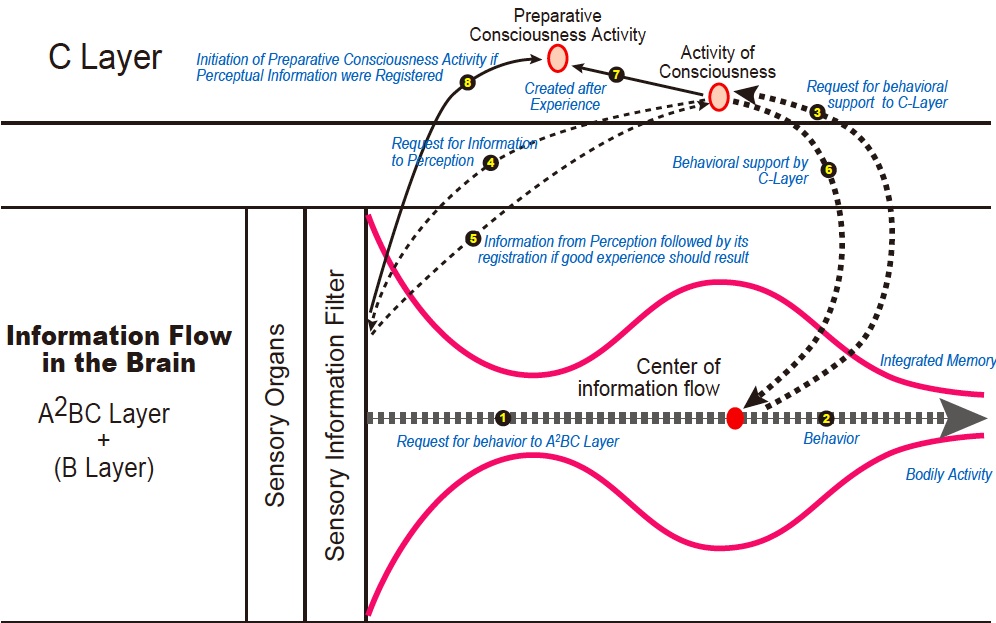
Figure 9. Interaction between Conscious Processing and Autonomous Automatic Behavior Control Processing.
As far as human–environment system operates in the mode as shown by Figure 9, consciousness and unconsciousness work collaboratively. This is shown with yellow shade in Figure 10. However, consciousness might drift further away from the synchronization mode to a mode in which consciousness is detached from the environment. Two of these states are shown as Consciousness III "Imagination" and Consciousness X "Egocentric Activity".
"Imagination activity" is associated with "Consciousness I" and "Consciousness II" which shape those behaviors that are synchronized with environment. It is not restricted to eligibility of behavior and thus the range of its variety is broadest.
Egocentric behavior is completely personal. It is isolated from the other conscious activities and it doesn't require the other persons' acceptance.
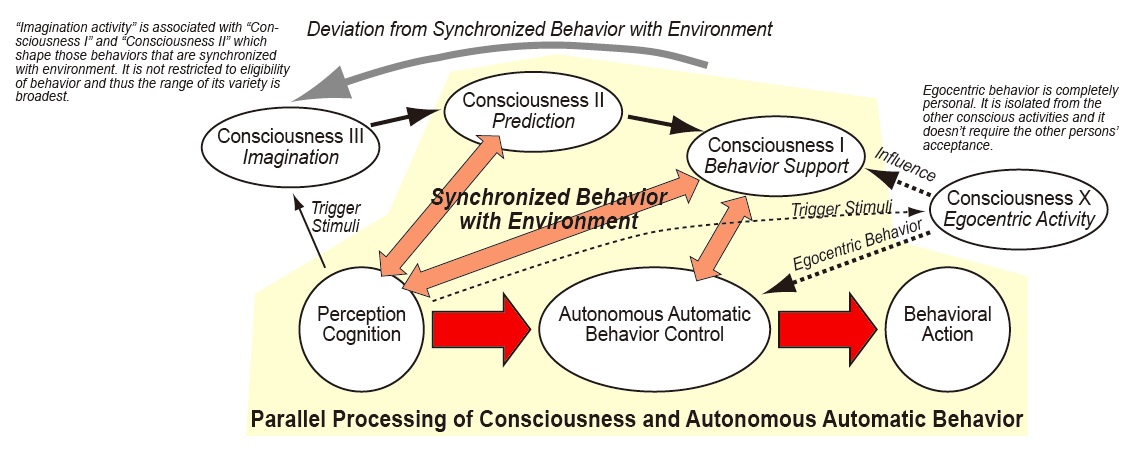
Figure 10. Parallel Processing of Consciousness and Autonomous Automatic Behavior.
Four Operation Modes of MHP/RT
Behavior is outcome of activities in A2BC-layer and C-layer both of which use working memory for preparing next actions. Depending on the situation, exerted behavior is mainly driven either by A2BC-layer or C-layer. Both layers work synchronously by sharing working memory. However in some situations both work asynchronously, or independently; working memory may be shared weakly or used solely for one of these layers. The following table summarizes four modes of MHP/RT. Information flows that characterize the modes are illustrated in separate figures.
| Four Operation Modes of MHP/RT | ||
| Synchronous Mode | Mode 1: Autonomous Automatic Behavior Control Driven | Daily activities Skilled performance |
| Mode 2: Consciousness Control Driven | Unskilled activities Learning Thinking | |
| Asynchronous Mode | Mode 3: Autonomous Automatic Control/Consciousness Control Weakly Coupled | Concentrating on skilled activities Shared use of working memory Easy to resume to Mode 1 or 2 when necessary |
| Model 4: Autonomous Automatic Control/Consciousness Control Isolated | Unconcentrated activities Separate use of working memory Time lag in resuming to Mode 1 or 2 activities when necessary | |
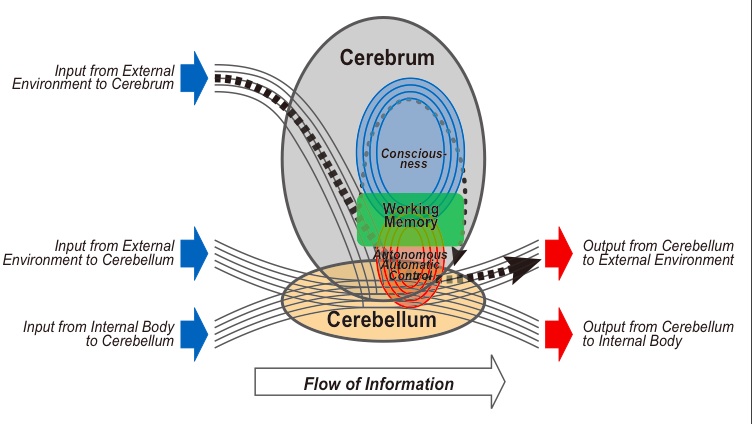
Figure 11. Mode 1: Autonomous Automatic Behavior Control Driven
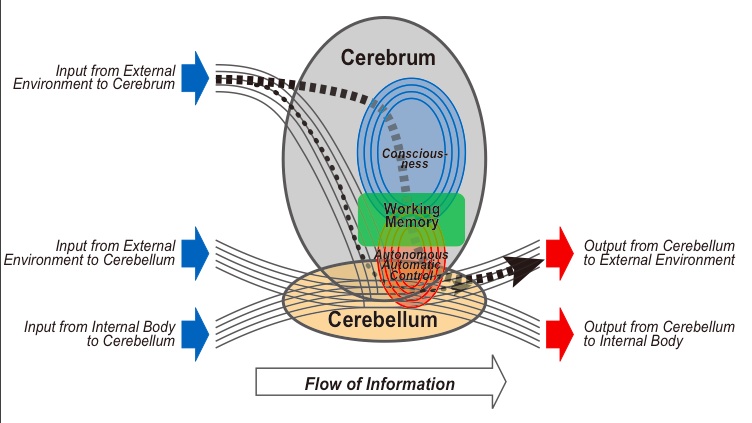
Figure 12. Mode 2: Consciousness Control Driven
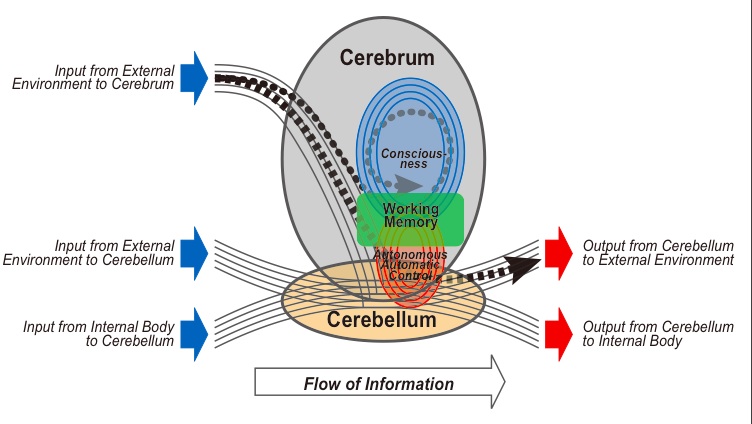
Figure 13. Mode 3: Autonomous Automatic Control/Consciousness Control Weakly Coupled
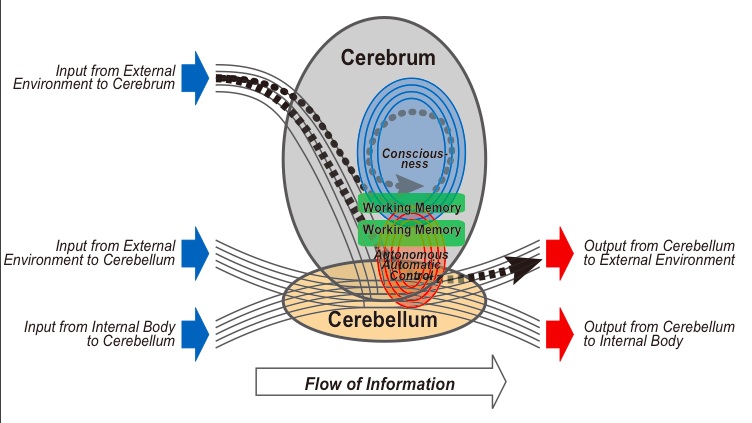
Figure 14. Model 4: Autonomous Automatic Control/Consciousness Control Isolated